Latest demo run
Priority-weighted trade study (static vs patrol).
demo_priority_trade_study_20260504_182930A reproducible simulation harness that compares static, random, greedy, and task-aware patrol policies on a heterogeneous ISR fleet under priority zones and time-varying surveillance tasks.
Both views auto-refresh from the most recent local run. The cards summarize the dynamic policy comparison; the rankings below show the priority-weighted trade study and the policy ranking.
Priority-weighted trade study (static vs patrol).
demo_priority_trade_study_20260504_182930Heterogeneous fleet, dynamic tasks, four policies.
policy_comparison_dynamic_heterogeneous_20260504_182940The priority-weighted demo asks how to spend a homogeneous fleet against priority zones. The policy comparison asks which policy serves a heterogeneous fleet best when surveillance tasks arrive on a clock.
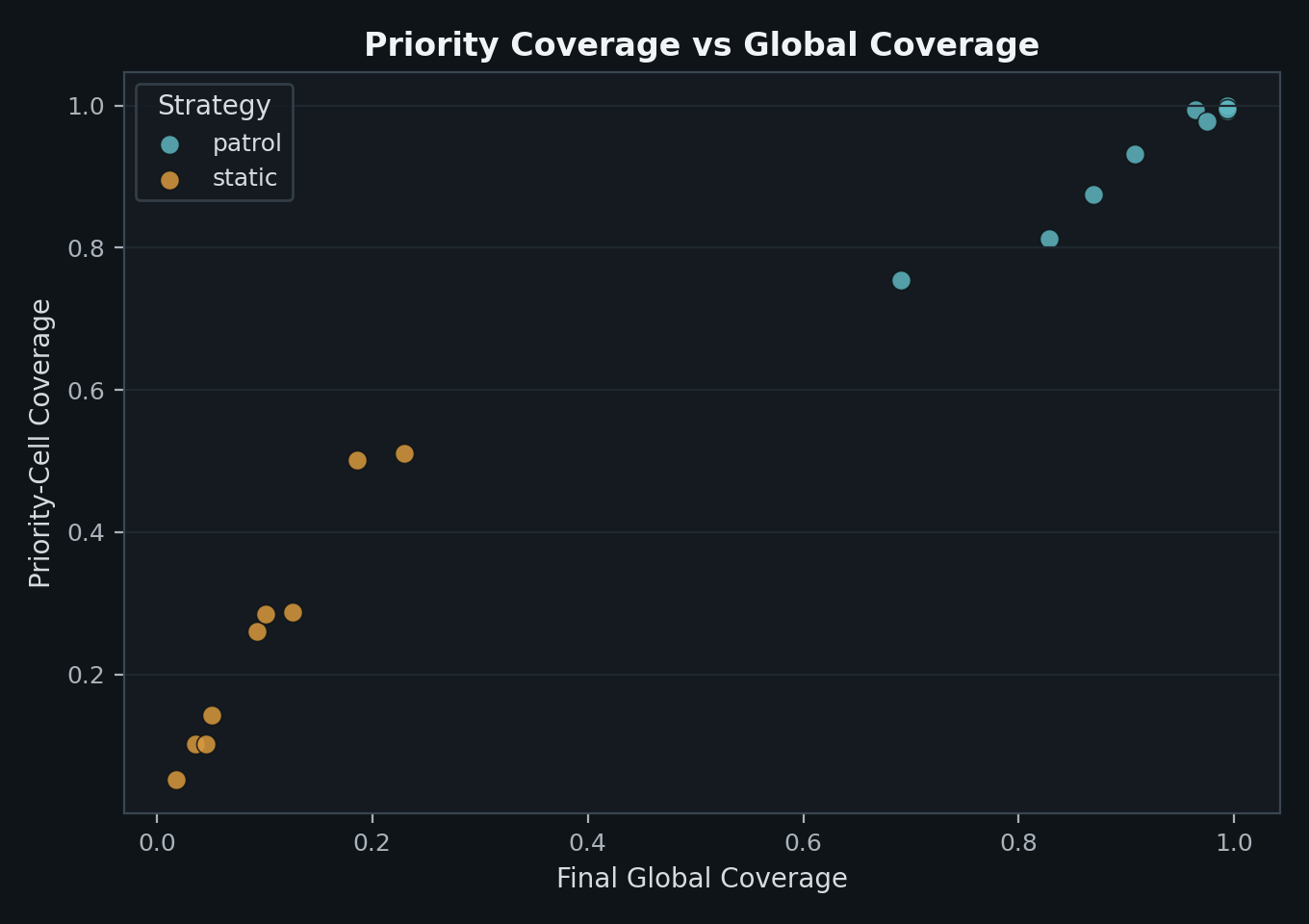
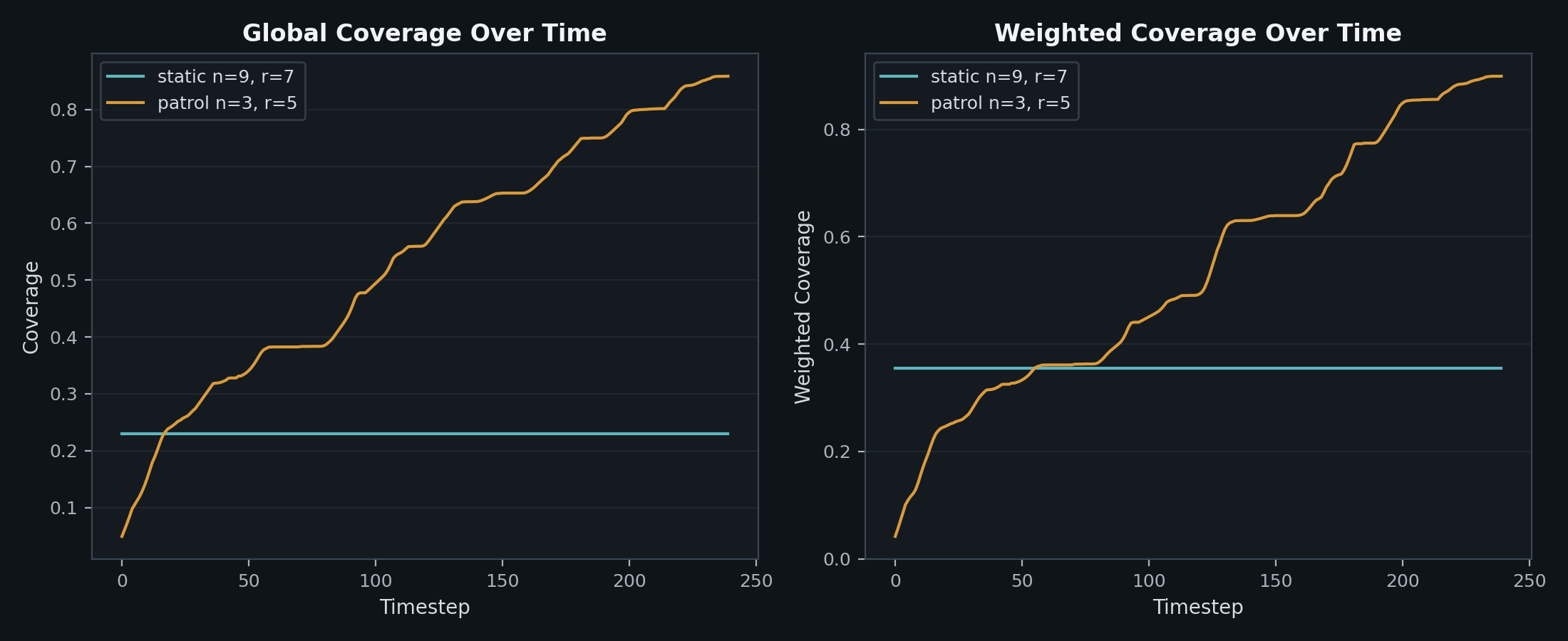
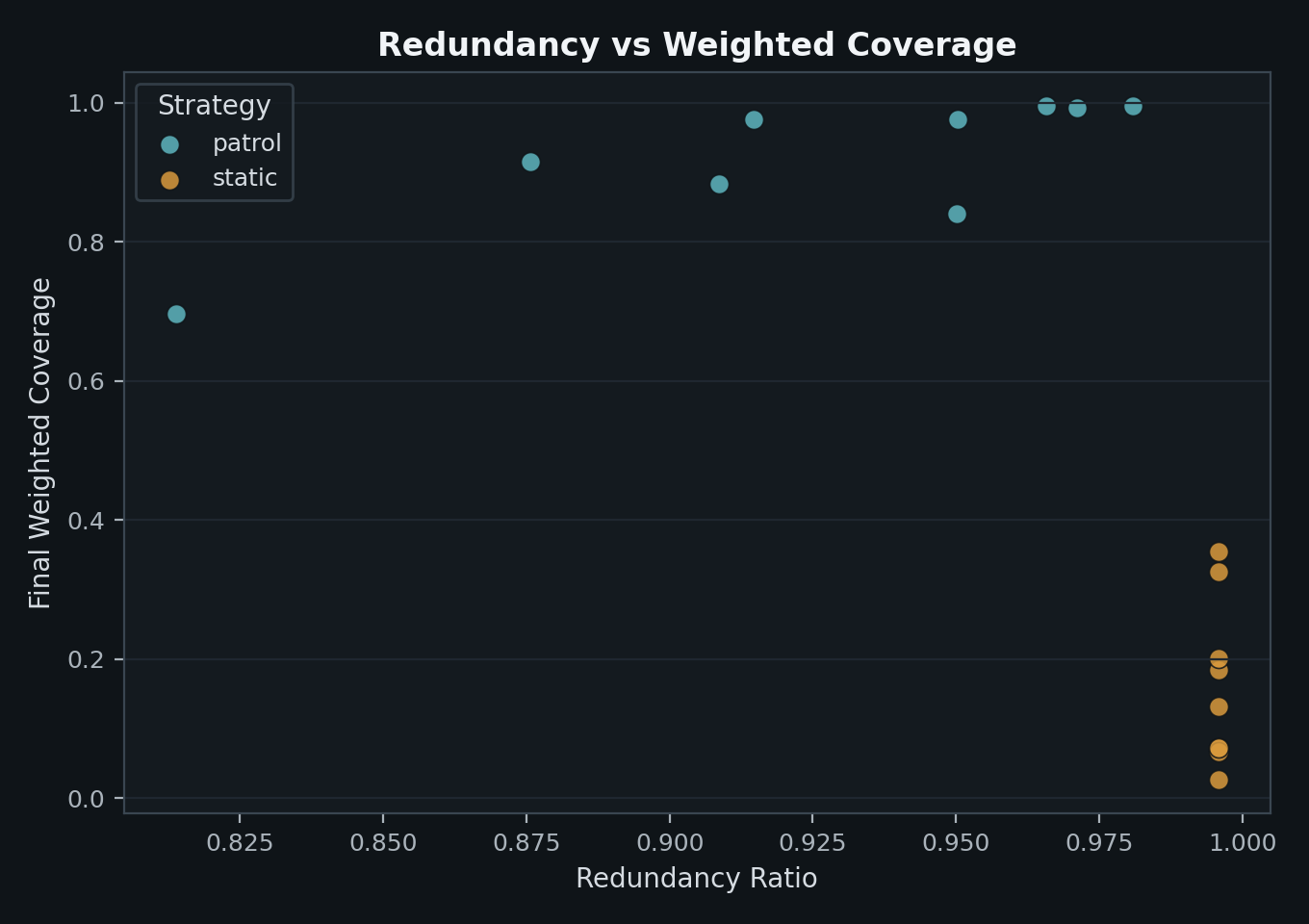
Static and patrol over the priority demo grid.
| Strategy | Drones | Radius | Mission Fit | Weighted Cov | Priority Persist |
|---|---|---|---|---|---|
| patrol | 3 | 5 | 0.816 | 0.884 | 0.863 |
| patrol | 6 | 7 | 0.802 | 0.993 | 0.893 |
| patrol | 3 | 7 | 0.797 | 0.841 | 0.904 |
| patrol | 9 | 7 | 0.781 | 0.995 | 0.916 |
| patrol | 6 | 5 | 0.781 | 0.976 | 0.846 |
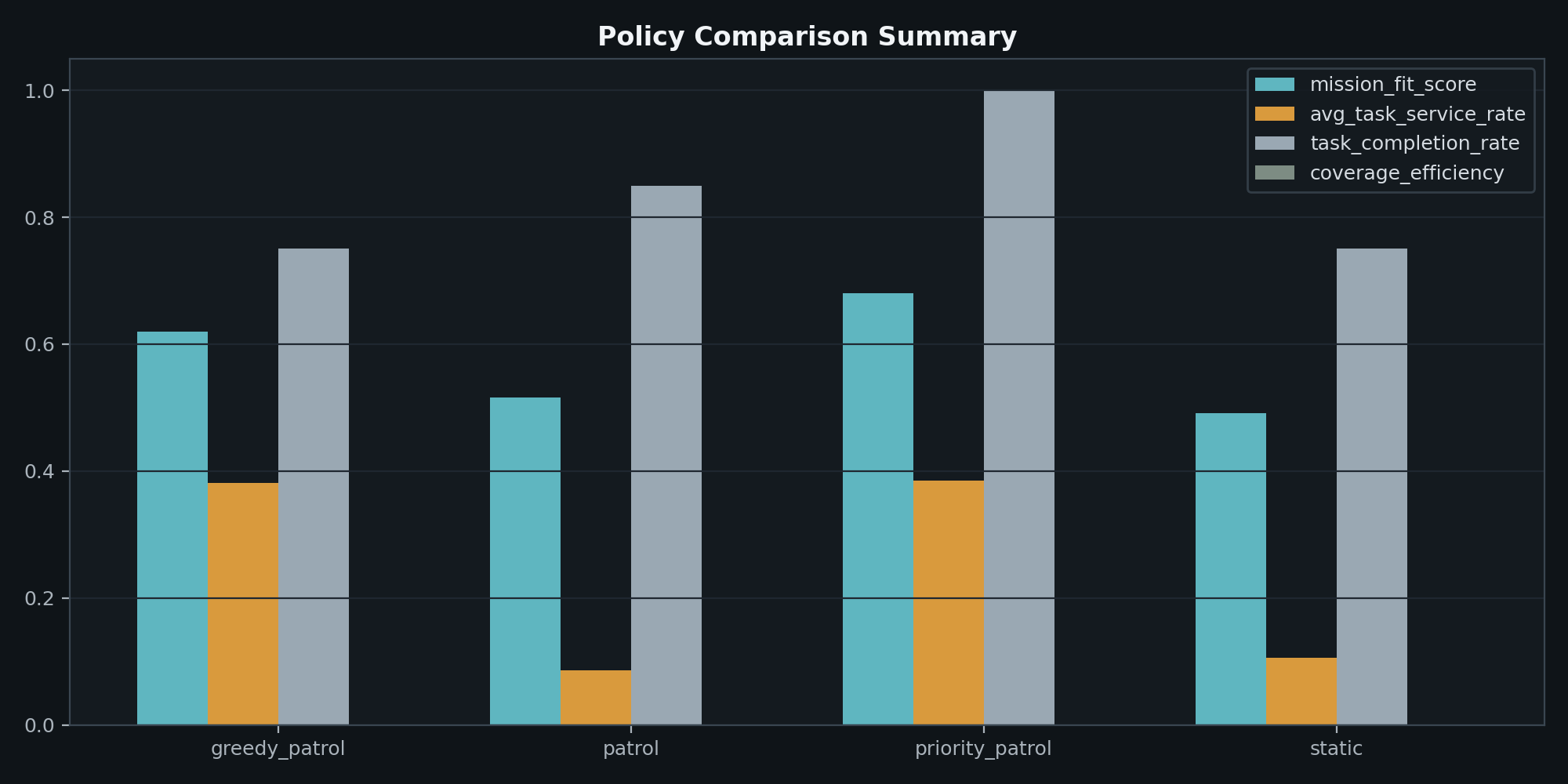
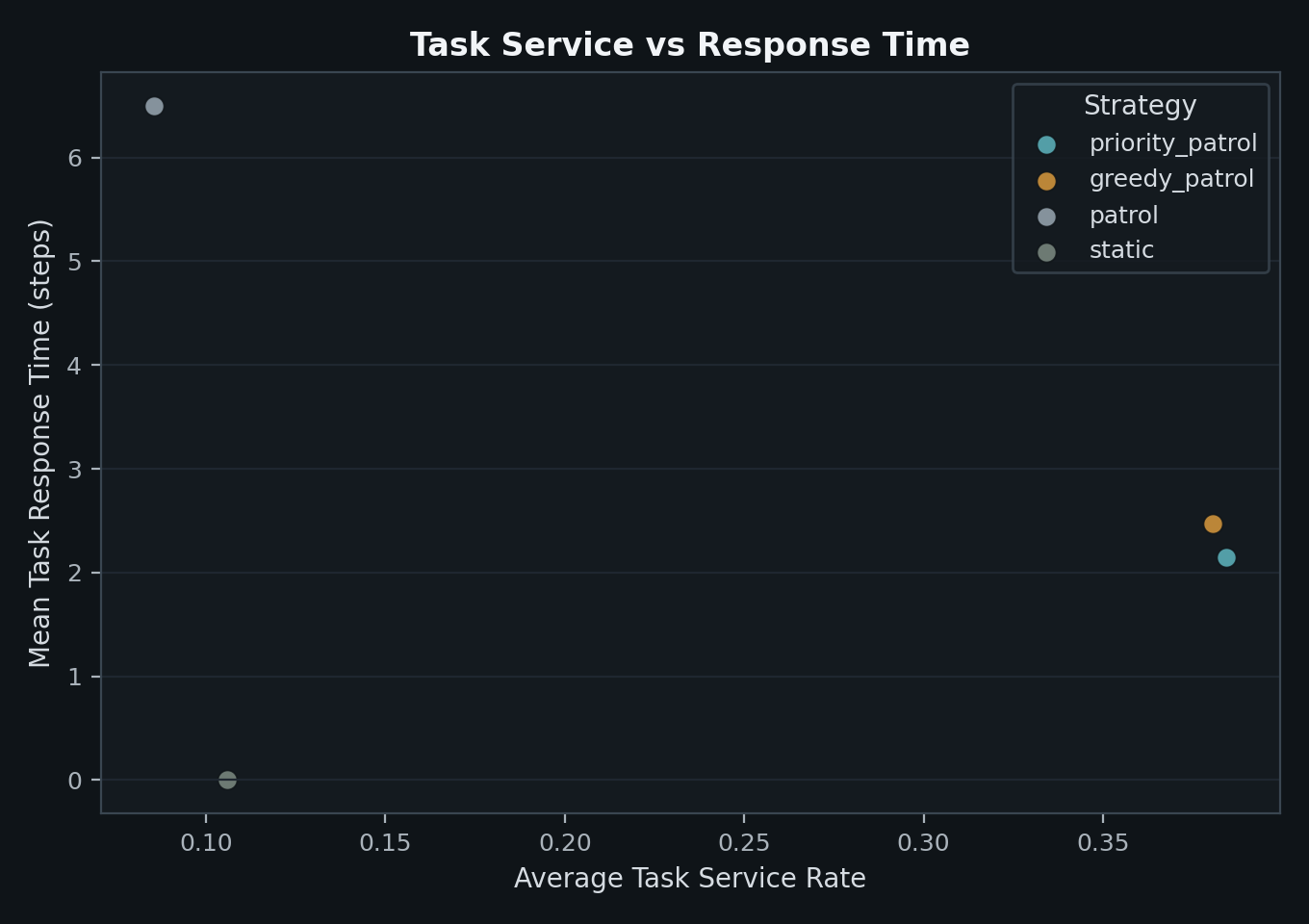
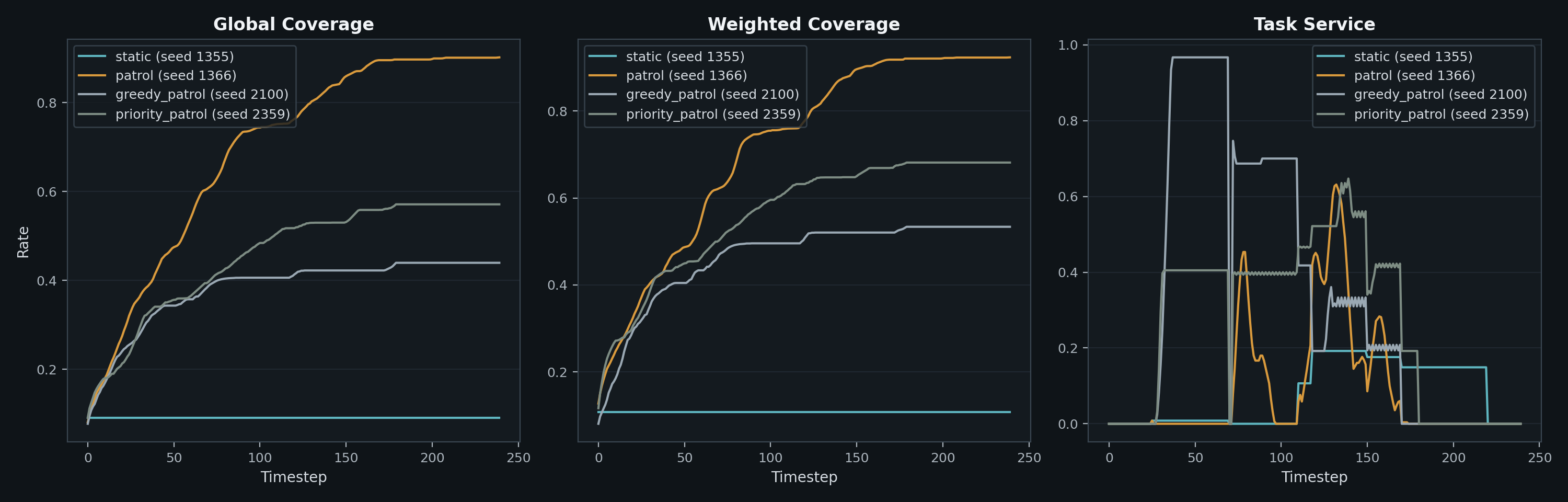
Static, random patrol, greedy, priority-aware patrol on a heterogeneous fleet.
| Strategy | Mission Fit | Weighted Cov | Task Service | Completion | Mean Response |
|---|---|---|---|---|---|
| priority_patrol | 0.680 | 0.562 | 0.384 | 1.000 | 2.15 |
| greedy_patrol | 0.620 | 0.496 | 0.381 | 0.750 | 2.47 |
| patrol | 0.516 | 0.834 | 0.086 | 0.850 | 6.50 |
| static | 0.491 | 0.107 | 0.106 | 0.750 | 0.00 |
These plots are committed in the repo (regenerated on every run) so this page is reviewable without checking out the timestamped result folders.
The site is fully reproducible from the local artifacts: rebuild the runs, rebuild the static figures, rebuild the page.
# 1. install $ python -m pip install -e . # 2. regenerate demo + policy artifacts $ make demo $ make policy # 3. rebuild the live demo + serve it $ make live-demo $ make serve-demo # open http://127.0.0.1:8010/docs/live_demo/index.html
The deeper writeups live in docs/.